


我们知道车牌识别停车系统能否正常工作与车牌摄像机有很大关系,如果停车场车牌摄像机角度调整不正确或识别区域设置错误,将会影响车牌识别正确率及工作效率。
摄像机角度调试
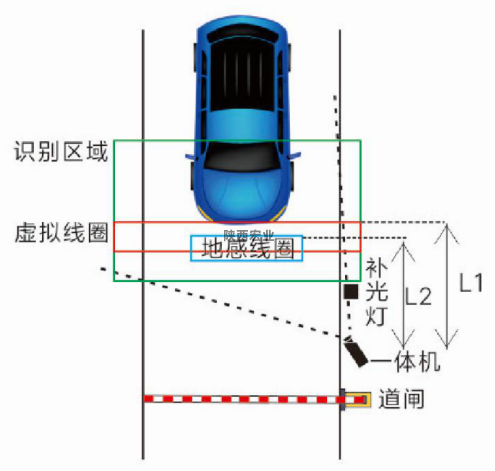
控制机要求安装在道闸前,安装在道闸后会影响识别率和使用效果。
使用视频流触发时,确保摄像机距离虚拟线圈上边缘3-6米的距离。(推荐使用)
使用压地感触发时,确保摄像机距离地感线圈的距离保持在3-4米。
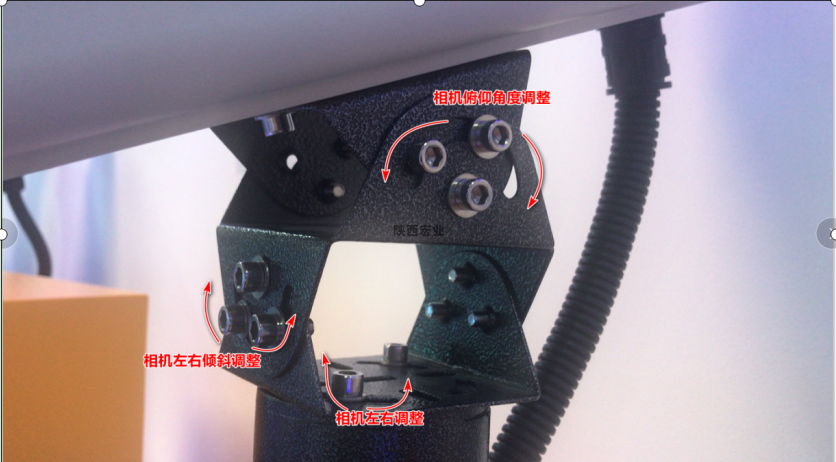
通过调整三维万向节保证摄像机的俯角需保持在15-40°之间。
通过调整三维万向节保证车牌的水平倾斜角≤5°,倾斜角过大容易引起识别错误。
调整补光灯的角度保证夜间车牌亮度合适,否则容易漏车。
角度调整
通过调整万向节支架螺丝,来调整摄像机向左向右水平倾斜角度,来达到车牌处于水平位置。

通过调整三维万向节将车牌在摄像机实时画面中尽量水平,车牌底部的两个角处于同一水平线时为最佳水平效果。车牌倾斜角度过大极易导致识别错误。参考效果如下:


配置识别区域和虚拟线圈
识别区域:
车牌只有在进入识别区域后才会被识别,是否按照标准绘制识别区域直接影响到最终的识别效果,未按照标准绘制识别区域有可能导致漏车或者是易识别错误等异常现象。
使用笔记本电脑连接摄像机,电脑IP段改成跟相机一样的段,通过浏览器访问摄像机IP绘制识别区域。

